李想深度解析VLA模拟人类司机工作模式研究

摘要:
李想对VLA进行了深度解析,通过模拟人类司机的工作模式,旨在提高自动驾驶技术的智能化水平,通过深入研究人类驾驶习惯、感知环境和决策机制,VLA技术能够更好地适应复杂的交通环境,提高行车安全性与效率,这一解析对于自动驾驶技术的发展具有重要意义,有望推动智能交通系统的进步。
李想详细解释了VLA模型,该模型旨在模拟人类司机的行为和工作方式,VLA模型通过模拟人类的决策过程,实现了更加智能、高效的自动驾驶体验,该模型的应用将有望提高自动驾驶的安全性和可靠性,推动自动驾驶技术的进一步发展。

电脑知识网报道,在昨晚的理想AItalk第二集活动中,李想详细阐释了VLA(视觉语言行动模型)的概念。
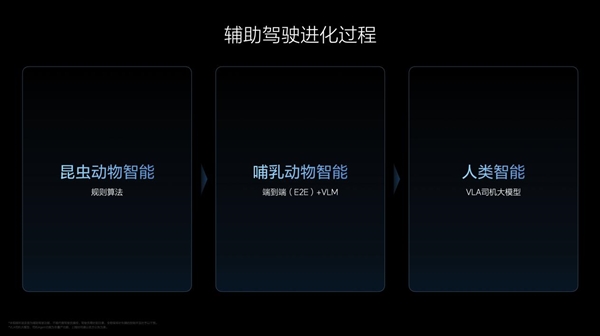
我们定义的VLA,不仅仅是一个简单的模型,特别是在理想汽车的应用背景下,它更像是一个司机大模型,一个能够像人类司机那样进行操作的模型,这一模型并不是突然出现的产物,而是一个逐步进化的结果。
从2021年开始,我们经历了第一个阶段,这个阶段主要依赖于机器学习的感知与后方的规则算法相结合,这些规则算法包括规划、控制以及执行等,是分段式的,在这个阶段,它更像昆虫动物的智能,遵循既定的规则,并且还需要高精地图的辅助,就像蚂蚁完成任务的方式一样。
李想将这一阶段的VLA比作昆虫的智能行为,虽然遵循一定的规则,但仍有其局限性,随着技术的不断进步和模型的逐步优化,VLA将逐渐展现出更加高级、更加智能化的特性,我们期待着它未来能够像人类的司机那样,具备更加复杂和灵活的工作能力。
(配图:李想详解VLA:像人类的司机一样去工作的一个模型)
图片来源:https://www.richonlighting.com/zb_users/upload/2025/05/20250507210035174662283549321.png